
We build robots for restoring and enhancing human mobility and perception.
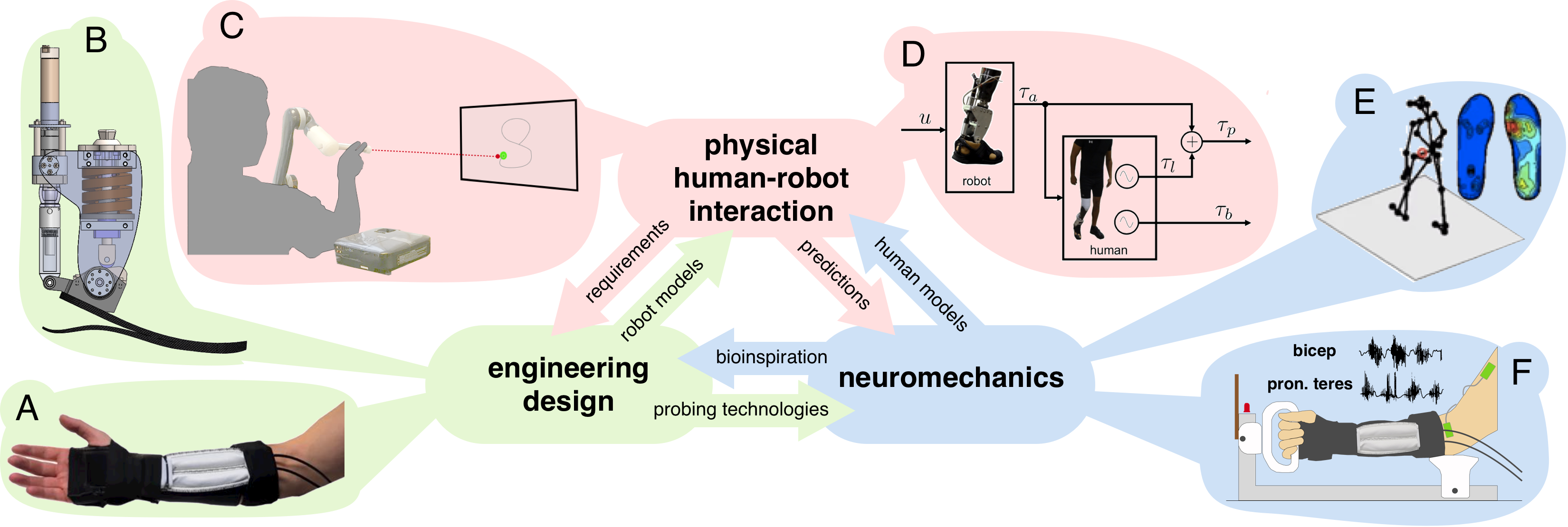
The Bionic Systems Lab at UCR investigates theoretical and engineering principles of human-robot systems aimed at restoring and enhancing human mobility and perception. We design, build, and test wearable and assistive robots, active prostheses and orthoses, and neuroprostheses. Our approach includes three synergistic areas: (1) design principles for human-centric and body-mounted robots, (2) mathematical models and control algorithms for human-robot systems, and (3) human-subject studies and data-based modeling of sensorimotor behavior. We envision wearable and assistive robots seamlessly integrating with users to empower people with disabilities, improve precision and personalized medicine, and extend sensory experience and physicality.